
Neuromorphic Computing for Autonomous Space Operations [Strategy]
This technology could enable capabilities such as real-time threat detection via event-based cameras, cognitive radio for interference-free communication, and resilient in-orbit manufacturing.


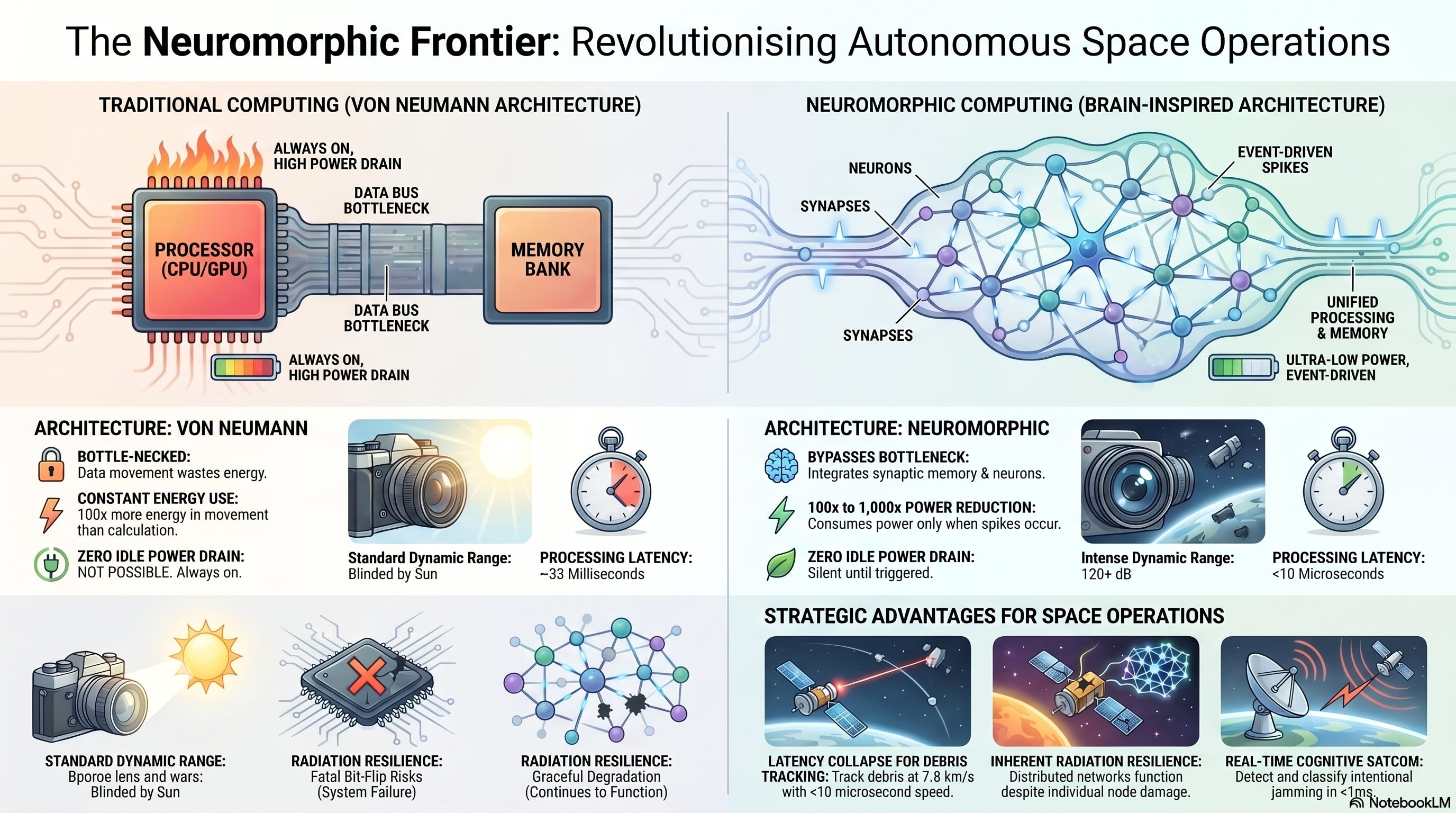
Neuromorphic computing represents a transformative shift for autonomous space operations by mimicking the efficient, event-driven processing of biological brains. Unlike traditional systems that waste energy moving data between memory and processors, these asynchronous architectures could unify these elements to drastically reduce power consumption on small satellites.
This technology could enable critical capabilities such as real-time threat detection via event-based cameras, cognitive radio for interference-free communication, and resilient in-orbit manufacturing. Beyond efficiency, neuromorphic hardware offers inherent radiation resistance through its distributed design, allowing systems to function reliably despite cosmic interference.
While flight missions have already validated the hardware's durability in orbit, the primary challenge remains developing standardised software toolchains to translate traditional AI models into spiking neural networks. Ultimately, overcoming these software and verification hurdles is essential for transitioning neuromorphic systems from experimental payloads to primary satellite controllers.
I. Neuromorphic Efficiency
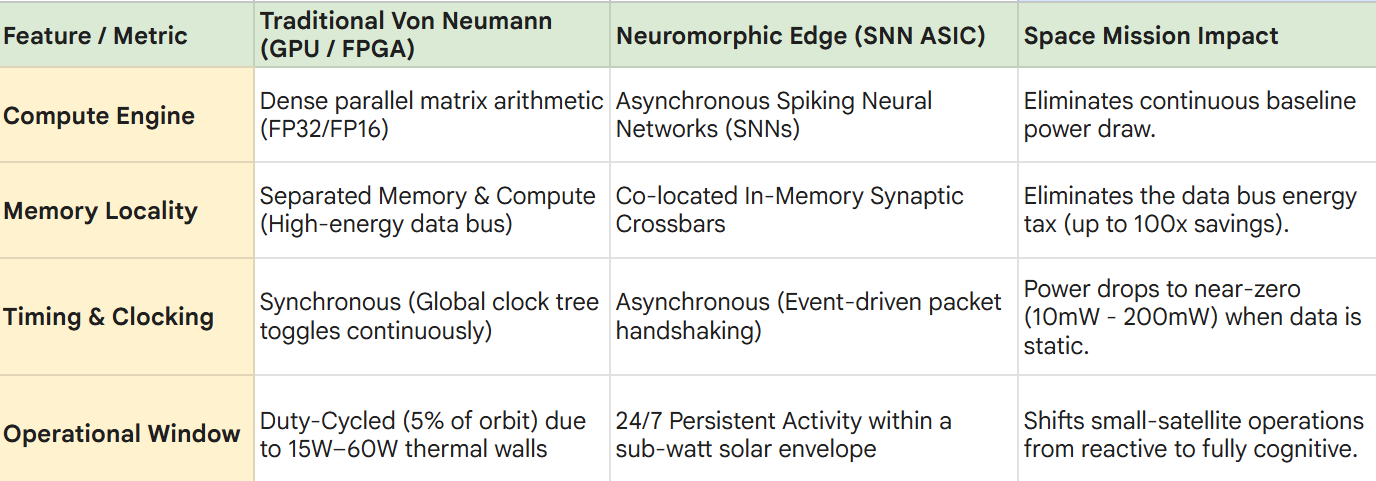
Conventionally, every clock cycle, data must be fetched from memory, moved across a high-speed data bus, processed, and written back to memory. In modern deep learning applications (such as convolutional neural networks used for Earth observation), moving data across this bus consumes up to 100× more energy than the actual mathematical computation itself.
Neuromorphic engineering bypasses this completely by unifying processing and memory within an asynchronous, bio-inspired framework. Unlike standard CPUs that process data in a continuous stream of 1s and 0s, neuromorphic chips use Spiking Neural Networks (SNNs). These systems are event-driven: they only consume power when a “spike” (a piece of data) occurs.
For a satellite, this could mean a reduction in power consumption by 100x to 1,000x compared to traditional GPUs or FPGAs, enabling 24/7 autonomous operations on even the smallest CubeSat platforms.
II. Strategic Advantages for Space Operations
Deploying traditional, power-hungry GPUs or highly complex FPGAs into space forces a severe trade-off between computational capability and survival. Neuromorphic architectures could circumvent these operational constraints. By decoupling performance from massive power draw, they could enable a suite of mission-critical capabilities within strict space-grade envelopes.
1. Real-Time SSA & Threat Mitigation
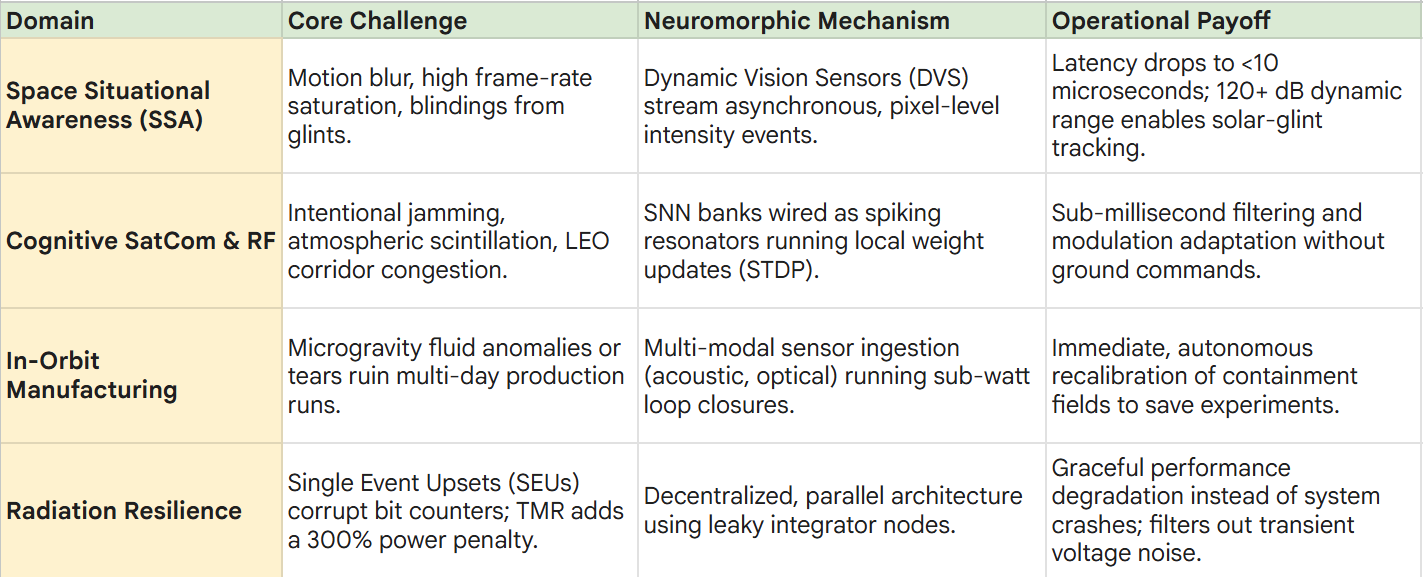
Traditional Space Situational Awareness (SSA) and Space Domain Awareness (SDA) rely on frame-based optical sensors (CMOS/CCD). When mounted on a satellite to detect hypervelocity orbital debris or non-cooperative maneuvering “inspector” satellites, these frame-based systems encounter deep physical limits: motion blur at short exposures and data saturation at high frame rates.
Neuromorphic vision systems replace frames with Dynamic Vision Sensors (DVS), or event-based cameras. Instead of exporting an image matrix, each individual pixel in a DVS operates autonomously, generating a binary packet (an “event”) only when it detects a log-intensity change in local photon flux.
When this sparse event stream interfaces directly with a neuromorphic Spiking Neural Network (SNN) processor, the advantages include:
Latency Collapse:
There is no exposure window or readout delay. The SNN processes each event packet asynchronously as it arrives. Latency scales down from standard frame-times (33 ms at 30 fps) to under 10 microseconds.
This is fast enough to compute the relative vector of a piece of debris traveling at 7.8 km/s relative velocity.
Intense Dynamic Range (120+ dB):
Because pixels do not share a global electronic shutter, they cannot blind each other.
A neuromorphic sensor can simultaneously track a dim, cold object against the dark void of space while positioned directly adjacent to a highly reflective, glinting solar array or the sunlit limb of the Earth.
2. Cognitive Radio & SatCom
Modern mega-constellations operating in Low Earth Orbit (LEO) experience highly volatile, fast-changing radio frequency (RF) environments. Satellites can encounter localized intentional jamming, atmospheric scintillation, and severe spectral congestion when crossing dense urban telecommunication corridors.
Standard digital signal processors (DSPs) use fixed, computationally heavy Fast Fourier Transforms (FFTs) to monitor wide bands of spectrum. This requires constant, high-wattage power consumption. Neuromorphic chips execute Cognitive Radio tasks through localized, temporal SNN architectures:
Asynchronous Filtering:
SNNs can be wired as a bank of spiking resonators where individual paths are tuned to specific temporal patterns or carrier frequencies.
If a specific frequency band is clear, the corresponding neurons remain silent. If localized interference or jamming occurs, the sudden surge in RF energy triggers immediate spikes, prompting the system to adapt instantly.
Sub-Millisecond Parameter Adaptation:
Because learning can happen on-chip via localized rules like Spike-Timing-Dependent Plasticity (STDP), the satellite can adjust its filter weights, beamforming profiles, and modulation schemes in real time.
It optimizes link budgets and spectral efficiency on the fly, without waiting for an orbit-delayed ground station command to reconfigure its payload.
3. In-Orbit Manufacturing & Biotech
As the space sector attempts to scales in-space manufacturing, processes like high-purity protein crystallization, advanced semiconductor layer deposition, and 3D bioprinting (e.g., organ-on-a-chip architectures) are exceptionally sensitive to subtle, unpredictable physical anomalies.
In microgravity fluid dynamics, an anomaly such as a micro-cavitation bubble or a surface-tension tear can ruin an entire production run within milliseconds. Traditional automation loops cannot handle this cleanly: downlinking the raw sensor telemetry to Earth introduces a multi-second latency bottleneck that renders real-time recovery impossible.
Ultra-Low-Power Edge Inferences:
Neuromorphic processors could ingest multi-modal sensor inputs (such as acoustic emission sensors, micro-accelerometers, and event-based cameras) running continuous, sub-watt anomaly detection loop closures.
Localized Reactive Control:
If a fluid boundary begins to deform during a bioprinting pass, the SNN detects the specific spatio-temporal signature of the failure and immediately recalibrates the acoustic containment fields or extrusion pressures.
This localized loop keeps the entire experiment viable without requiring any ground-station intervention.
4. Radiation Resilience by Design
The space radiation environment presents a constant threat to digital systems. High-energy solar protons and galactic cosmic rays striking a silicon substrate cause Single Event Effects (SEEs).
The most common of these is the Single Event Upset (SEU), where a charged particle deposits enough ionized charge to flip a bit within a processor’s memory register, program counter, or cache.
Traditional computers combat SEUs using Triple Modular Redundancy (TMR), running three identical circuits in parallel and voting on the output. While effective, TMR triples the required chip area, significantly inflates cost, and introduces a 300% power penalty; making it highly inefficient for low-SWaP spacecraft.
Neuromorphic architectures are inherently resilient to radiation faults due to their core design properties:
Structural Redundancy and Distributed Information:
In an SNN, a learned model is not stored as a single compiled block of binary instruction code in a centralized memory cache.
Instead, information is distributed across the network as thousands of localized synaptic weights and connection topologies.
Graceful Degradation:
If a heavy ion strike destroys an entire neural node or corrupts a local synaptic weight matrix, the system does not experience a kernel panic or a fatal state-machine lockout.
Because processing is massive, parallel, and decentralized, the network continues to operate, experiencing only a marginal, graceful degradation in performance or inference accuracy.
Asynchronous Timing Isolation:
In a clocked processor, a radiation-induced Single Event Transient (SET) can create an electrical voltage glitch that propagates down a clock tree, corrupting an entire processing cycle.
In an asynchronous, clockless neuromorphic chip, a transient voltage spike is simply interpreted by the network as an anomalous, single noise spike.
The leaky integrator mechanics of downstream neurons naturally filter out this noise, absorbing the fault without system-wide interruption.
III. Neuromorphic Proofs of Concept
Driven by institutional backing from NASA and the European Space Agency (ESA), a lineage of flight missions and active orbital testbeds has emerged, validating the survivability and efficiency of non-von Neumann hardware in the space environment.
1. Flight-Proven Demonstrations
A. TechEdSat-13 (NASA Ames)
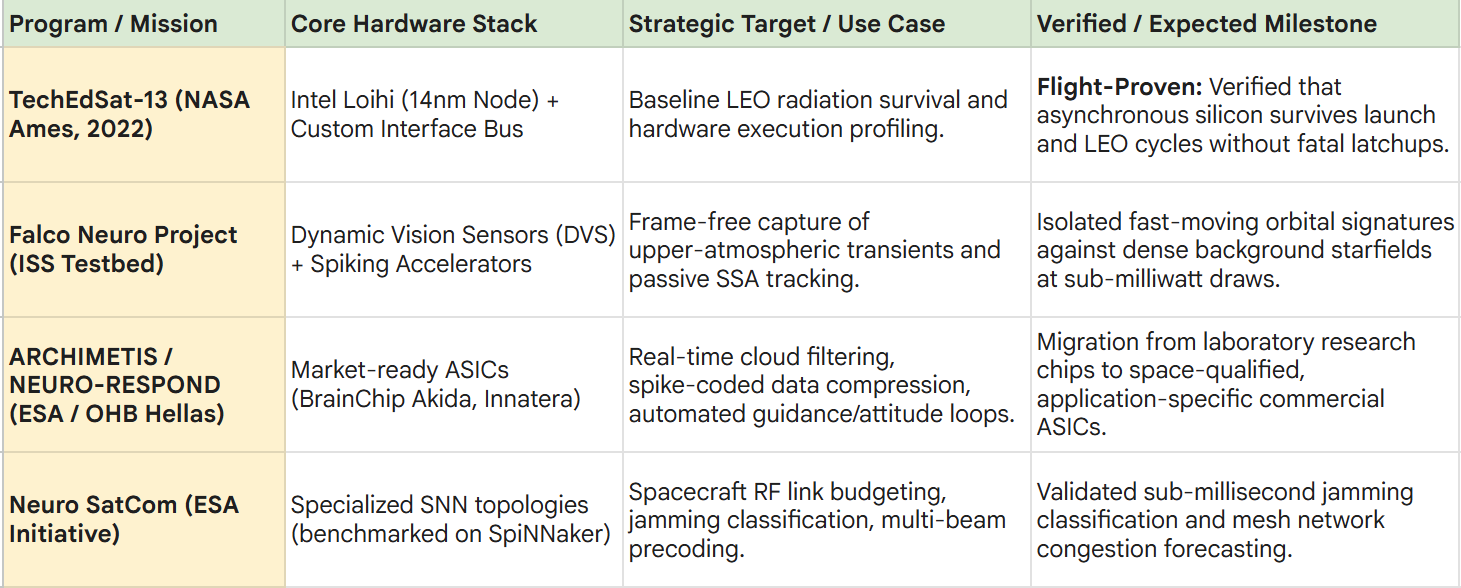
Launched in January 2022 via a Virgin Orbit LauncherOne vehicle, TechEdSat-13 was a 3U CubeSat that served as a pivotal baseline experiment.
The Hardware Stack:
The payload paired an Intel Loihi neuromorphic research chip (fabricated on a 14nm process node) with a custom-engineered interface board and three distinct communication channels.
Mission Objectives:
The flight directly monitored the performance of the Loihi architecture under continuous exposure to Low Earth Orbit (LEO) radiation.
The experiment executed a series of machine learning scripts of increasing length and complexity to track Single Event Upsets (SEUs) and software runtime errors.
Operational Outcome:
The hardware demonstrated that bio-inspired asynchronous architectures could survive the initial mechanical vibrations of launch and operate reliably within the radiation and thermal cycles of LEO without experiencing catastrophic latchups.
B. The Falco Neuro Project & International Space Station (ISS) Testbeds
Parallel to standalone CubeSat missions, western defense agencies and research consortia have utilized the ISS external payload berths to evaluate event-based vision hardware.
The Paradigm:
These experiments paired Dynamic Vision Sensors (DVS) directly with low-power spiking accelerators to map high-speed atmospheric transients (such as transient luminous events like “sprites” and “elves”) and to perform passive, frame-free Space Situational Awareness (SSA).
Result:
The hardware successfully isolated fast-moving orbital signatures from background starfields at sub-milliwatt power draws, providing a foundational data library for current edge-processing algorithms.
2. Active Programs
The focus of space-grade neuromorphic deployment has shifted from basic hardware survival to complex, application-specific integration, particularly within Western Europe’s space ecosystem.
A. ARCHIMETIS & NEURO-RESPOND (ESA / OHB Hellas)
Initiated under the European Space Agency’s Discovery Programme, ARCHIMETIS is a specialized campaign dedicated to evaluating neuromorphic architectures for core on-board processing functions.
The Scope:
Led by prime contractors including OHB Hellas, the project ports established deep learning networks into highly optimized Spiking Neural Networks (SNNs).
Core Use Cases:
The flight software targets three key orbital domains:
Earth Observation (EO) Data Prioritization: Sorting and discarding cloud-covered imagery at the sensor face before it touches the onboard storage bus.
Data Handling and Compression: Using asynchronous spike-coding to compress telemetry streams with minimal mathematical overhead.
Control-Support Functions: Providing deterministic, ultra-low-latency processing for automated satellite guidance and attitude loops.
The Hardware Focus:
Moving beyond research silicon like Loihi, these programs evaluate market-ready neuromorphic Application-Specific Integrated Circuits (ASICs), such as BrainChip’s Akida and Innatera’s low-power processors, against conventional embedded space AI solutions like FPGAs.
B. ESA’s Neuro SatCom Initiative
Recognizing that satellite communication (SatCom) infrastructure is increasingly vulnerable to radio frequency (RF) vulnerabilities, ESA completed the foundational architectural phase of the Neuro SatCom project.
The initiative benchmarked specialized neuromorphic topologies (including simulations run on mass-core neuromorphic architectures like the SpiNNaker platform) against state-of-the-art space-qualified FPGAs like the AMD/Xilinx Versal ACAP. The program successfully validated SNN models for three critical SatCom operational profiles:
Real-time Jamming Classification:
Recognizing the spectral signature of intentional electronic warfare interference within less than one millisecond of signal onset.
Dynamic Congestion Forecasting:
Predicting routing blockages across multi-layered mesh networks based on asynchronous packet flow variations.
Precoding Matrix Computation:
Streamlining multi-beam satellite transmissions to maximize spectral efficiency over high-density geographic cells.
IV. Software & Deployment Bottlenecks
The fundamental barrier to the widespread operational adoption of neuromorphic computing in space systems has shifted. While hardware survivability was once the primary concern, the successful flight of Intel’s Loihi on TechEdSat-13 and subsequent ground-testing validations have proven that asynchronous, non-von Neumann silicon can withstand both launch dynamics and the radiation environments of Low Earth Orbit (LEO).
Instead, the critical engineering bottleneck lies in the neuromorphic software toolchain.
Bridging the gap between standard machine learning frameworks and the physical constraints of space-qualified neuromorphic hardware requires resolving architectural mismatches.
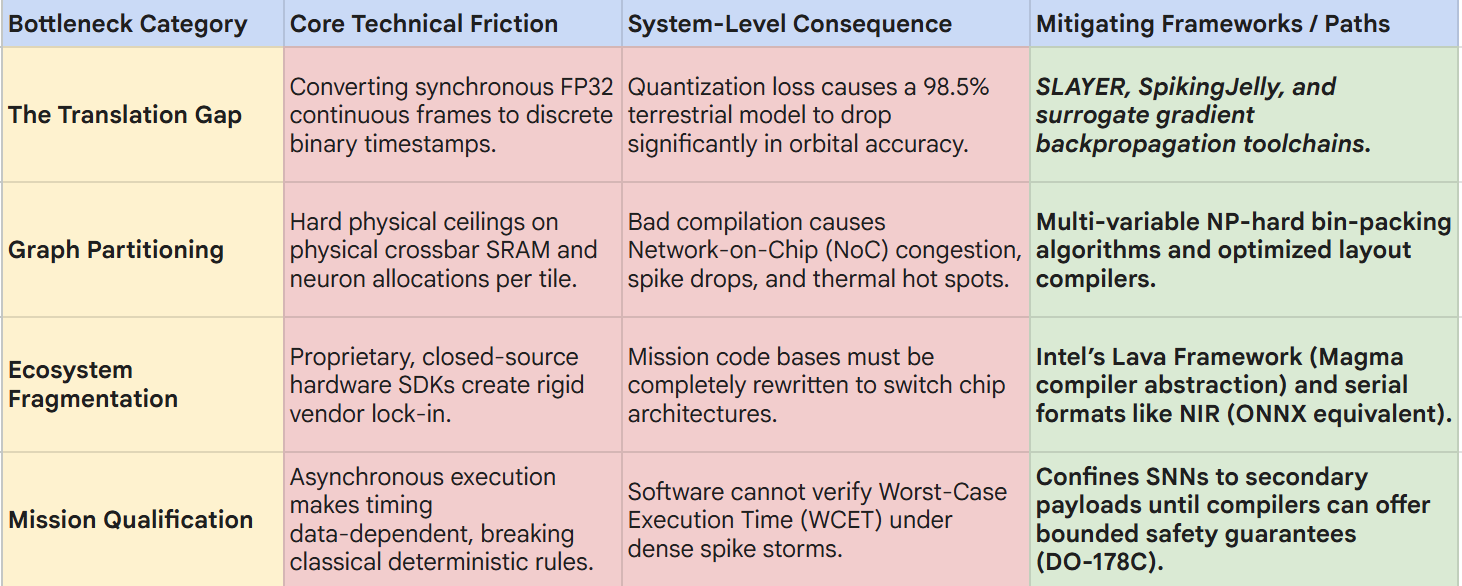
1. The Mathematical Translation Gap (ANN-to-SNN Conversion)
The overwhelming majority of modern artificial intelligence models are built using traditional deep learning libraries like PyTorch or TensorFlow. These architectures depend on continuous-time, high-precision floating-point arithmetic (FP32 or FP16) operating within a synchronous execution model.
Conversely, neuromorphic ASICs execute Spiking Neural Networks (SNNs) utilizing discrete, binary, time-stamped events.
To bridge this divide, software compilers must execute highly complex model conversions:
Rate Coding vs. Direct Training:
Compilers must convert continuous activation values from an Artificial Neural Network (ANN) into corresponding spike frequencies or precise spike times.
If not managed properly, this conversion introduces a profound Quantization Loss, causing a trained model’s classification accuracy to degrade upon hardware deployment.
The Vanishing Accuracy Problem:
A convolutional network designed for Earth observation might achieve 98.5% accuracy on a terrestrial GPU.
When compiled down to a neuromorphic substrate using basic integrate-and-fire approximations, that accuracy can drop significantly due to temporal noise and precision loss.
Compilers must integrate sophisticated Spike-Timing-Dependent Plasticity (STDP) simulation or surrogate gradient backpropagation (e.g., using toolchains like SLAYER or SpikingJelly) during the optimization loop to maintain mission-acceptable inference thresholds.
2. Resource-Constrained Graph Partitioning (The Crossbar Mapping Problem)
Unlike von Neumann architectures where a centralized memory bus serves a uniform compute engine, neuromorphic hardware utilizes highly distributed, tile-based architectures connected by an asynchronous Network-on-Chip (NoC).
Each physical neurosynaptic core contains a hard ceiling of available hardware neurons and synaptic connection registers (e.g., a fixed allocation of local SRAM per core).
The compiler’s primary job is to solve a multi-variable NP-hard bin-packing and routing problem:
Sub-Graph Partitioning:
The software stack must segment a massive neural network graph into hyper-granular clusters that physically fit inside individual core crossbars.
NoC Routing Optimization:
If a network layer spans multiple physical tiles, the spikes must travel across the chip’s internal communication fabric.
If the compiler places heavily communicating layers too far apart on the physical die, the NoC will encounter routing congestion.
This leads to spike drops, unpredictable execution latencies, and localized thermal spikes; all of which are potentially mission-ending failure modes for a spacecraft’s real-time guidance system.
3. Path Toward Space-Qualified Open Software Frameworks
Historically, the neuromorphic ecosystem has been deeply fragmented. Every hardware developer built a proprietary, closed-source software development kit (SDK) tailored exclusively to their proprietary architecture. This model is incompatible with the strict verification pipelines required by aerospace primes and space agencies.
To achieve operational status, the space sector is driving toward unified, open-source intermediate representations:
Intel’s Lava Framework:
An open-source, platform-agnostic software framework designed specifically for developing neuro-inspired applications.
Lava introduces low-level abstractions (via its Magma compiler interface) that decouple the high-level algorithmic architecture from the underlying physical hardware backend.
This allows engineers to build an anomaly detection system, verify its behavior on conventional CPU/GPU simulators, and compile it directly to neuromorphic chips like Loihi 2 without changing the core codebase.
Neuromorphic Intermediate Representation (NIR):
To prevent hardware vendor lock-in, global research consortia have introduced unified formats like NIR.
Acting as the neuromorphic equivalent to the traditional ONNX format in standard deep learning, NIR provides a stable, serialized instruction set that allows interoperability across diverse simulation environments and hardware platforms.
4. The Aerospace Mission Qualification Challenge
The final and most demanding hurdle for neuromorphic compilers is the rigorous process of aerospace software safety qualification (such as compliance with DO-178C or ECSS standards).
Because neuromorphic computing is fundamentally asynchronous and event-driven, it introduces a level of execution non-determinism that classical space flight software strictly forbids:
The Determinism Dilemma:
In a traditional CPU, an engineer can calculate the exact clock cycle count required to execute a specific routine.
In an SNN, execution timing is data-dependent; the network’s processing path changes dynamically based on the frequency and arrival sequence of input spikes.
Verification Tooling Gap:
Current software qualification tools are built for sequential instruction streams.
There are no standardized, certified tools available to perform formal verification or strict code coverage testing on asynchronous, message-passing neural graphs.
Until compiler stacks can provide mathematical guarantees on worst-case execution time (WCET), bounded memory consumption, and deterministic state transitions under high-activity spike storms, neuromorphic architectures will likely remain confined to secondary, experimental payloads rather than taking control of critical, primary satellite bus operations.
Operational Insight: The true value of programs like ESA’s ARCHIMETIS is forcing the development of verified compiler toolchains. A victory condition for neuromorphic space systems is a compiler that lets an engineer drop a PyTorch model into a flight qualification pipeline and receive a reliable, bounded SNN instruction set with a single command.
 | A guest post by
|