Space Robotics [Innovation]
Opportunities move beyond basic mechanical automation toward creating kinetic intelligence that can survive and adapt to extreme vacuum and thermal environments.

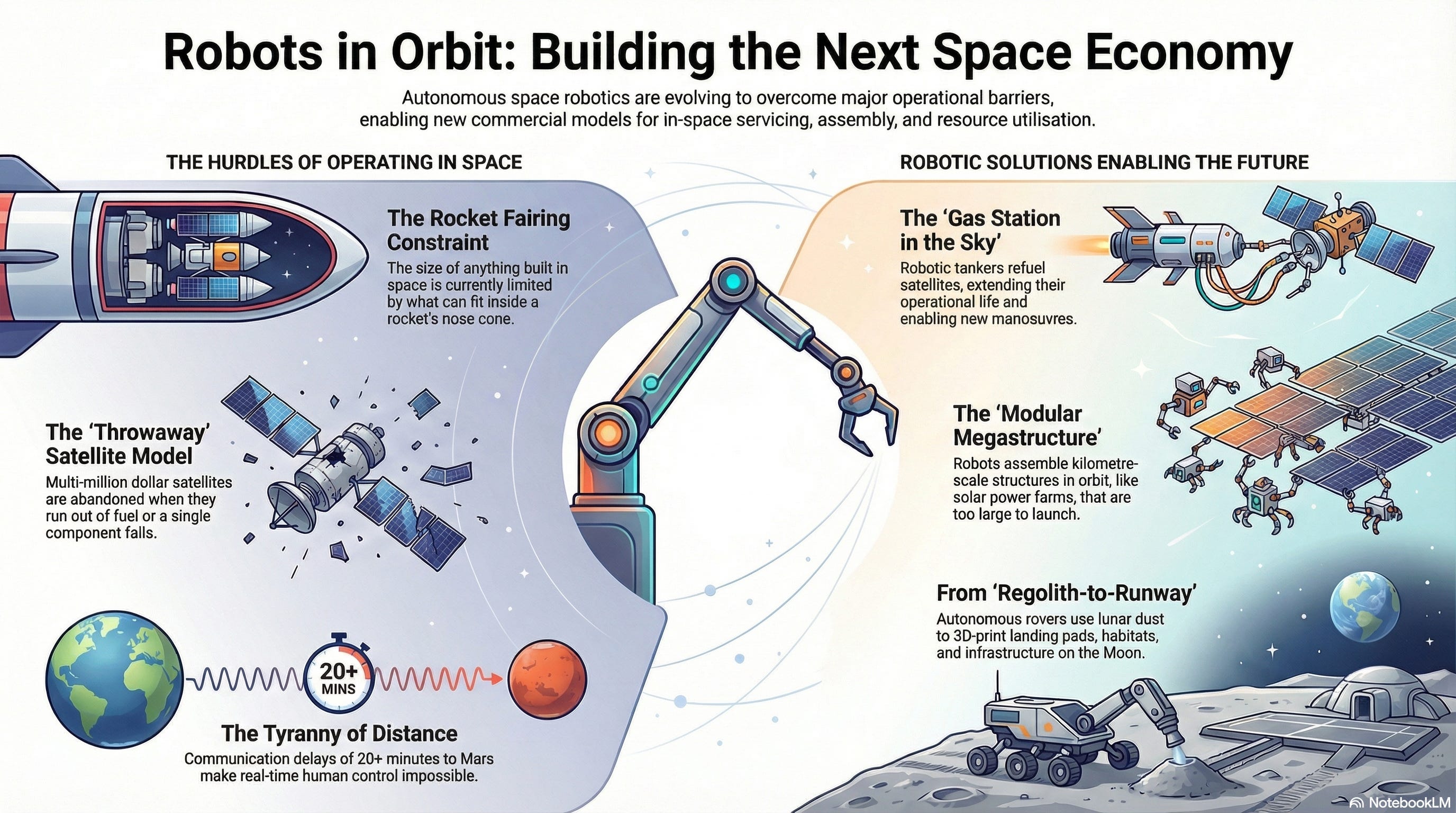
Space Robotics are evolving from remotely operated mechanical arms into autonomous agentic systems capable of independent decision-making in unstructured environments.
Unlike early space-station manipulators, modern space robotics can act as the kinetic intelligence layer of orbital infrastructure, enabling complex assembly, life-extension servicing, and autonomous planetary exploration.
I. Market Demand Drivers
The transition toward high-autonomy robotics is fueled by the need to manage assets in deep space where human intervention is physically or economically challenging.
1. The “Latency Barrier” & The Autonomy Mandate
The 2.5-Second Round Trip: For Lunar operations, the delay is manageable, but for Martian or Asteroid missions, communication lags of 20+ minutes make real-time teleoperation unviable. Robotics therefore need to transition from “puppets” to “agents” that can perceive, plan, and execute tasks without Earth-based oversight.
Safety-Critical Proximity Ops: Docking with a tumbling, “dead” satellite requires millisecond-level adjustments to avoid catastrophic collisions. Human reaction times are insufficient; high-speed on-board computer vision is a potential solution.
2. Orbital Life Extension & “The Circular Economy”
From Disposable to Repairable: Historically, a $500M satellite was decommissioned simply because it ran out of fuel or a single sensor failed. Robotic “Life Extension Pods” (LEPs) are now being deployed to physically grapple these assets, providing external propulsion and robotic repair to potentially extend mission life by decades.
Active Debris Removal (ADR): With over 36,000 trackable pieces of space junk, the risk of “Kessler Syndrome” is increasing. Robotic “Tugboats” could be a solution to autonomously capture non-cooperative debris, recycle &/or de-orbit it safely.
3. The Scaling of In-Space Infrastructure
The Fairing Constraint: What we build in space is currently limited by the size of the rocket’s nose cone. Space robotics could enable the “Flat-Pack” strategy: launching dense components and using robotic swarms to assemble kilometer-long solar arrays or 30-meter telescope reflectors in-situ.
II. Structures & Functions of Modern Space Robotics
Space robotics are evolving into distributed network of sensors, actuators, and AI “brains” designed to survive the harshest vacuum and thermal gradients.
1. The Kinetic Front-End (Manipulators & Grippers)
High-Degree-of-Freedom (DOF) Arms: Systems are now utilizing 7-axis configurations (mimicking human range of motion) to reach around obstacles on complex satellite buses.
Universal Docking Interfaces: Rather than specialized tools, robots use “standardized “grapple fixtures” or gecko-inspired adhesives that can “stick” to surfaces in a vacuum without applying damaging force.
2. The “Eyes” (Perception & Navigation)
LiDAR-Based SLAM: Simultaneous Localization and Mapping (SLAM) allows robots to build 3D maps of unknown objects (like asteroids or damaged satellites) in real-time, even in total darkness or blinding direct sunlight.
Neuromorphic Vision: Sensors that process only “changes” in pixels (event-based cameras), allowing for ultra-low power consumption and high-speed tracking of fast-moving orbital targets.
3. The “Brain” (Edge Computing & Control)
Radiation-Hardened AI: Modern chips (like the RISC-V architectures) are being “hardened” to resist cosmic ray upsets, allowing neural networks to run locally on the robot rather than relying on a ground-link.
Contact Dynamics Simulation: AI models that predict “Newtonian Kickback.” In microgravity, pushing a bolt causes the robot to push itself away; the “Brain” must simultaneously manage counter-thrusting to maintain stability.
III. Enabling Technologies
1. Soft Robotics & Compliant Mechanisms
Tensegrity Structures: Robots made of cables and rods that can “bounce” and deform upon landing on a planetary surface, preventing structural snaps in low-gravity environments.
Electro-Adhesive Grippers: Using static electricity to “grab” non-conductive materials, allowing robots to manipulate delicate solar foils without tearing them.
2. Multi-Agent Swarm Intelligence
Distributed Assembly: Instead of one large arm, hundreds of “CubeSat-sized” robots work like ants to move large trusses. If one fails, the “swarm” re-routes the task, ensuring mission resilience.
Collaborative SLAM: Multiple robots sharing a single map, allowing a group of rovers to map a Lunar crater 10x faster than a single unit.
3. Cryogenic Actuators & Lubrication
Non-Thermal Gearing: Traditional lubricants freeze in the -170°C shadows of the Moon. New robotics utilize Bulk Metallic Glass (BMG) gears that remain ductile and operational without heaters, drastically reducing power consumption.
IV. Key Challenges
1. The “Contact Dynamics” Problem
The Zero-G Dance: In space, every action has an equal and opposite reaction. If a robotic arm applies 10 Newton-meters of torque to a bolt, the entire satellite starts to rotate. Solving the “Coupled Dynamics” between the robot and its host platform remains a primary computational hurdle.
2. Thermal Management in Vacuum
The Heat Sink Void: On Earth, fans cool electronics. In a vacuum, there is no air to carry heat away. Robots rely on passive radiation and Phase Change Materials (PCM) to prevent their processors from melting during high-intensity tasks.
3. Validation & “Shadow Testing”
Gravity Mimicry: We cannot perfectly simulate 0G on Earth. Robots are tested in “Neutral Buoyancy” tanks (water) or on “Air Bearing” floors, both of which introduce drag and friction that don’t exist in space, leading to “calibration drift” once they reach orbit.
4. The “Lunar Dust” Scourge (Regolith Management)
Electrostatic Abrasion: Unlike Earth’s weathered sand, Lunar regolith is comprised of jagged, glass-like shards. These particles are electrostatically charged and “cling” to robotic joints and camera lenses. Traditional rubber seals are quickly shredded, necessitating “Magnetic Liquid Seals” or “Ferrofluidic Joints” to prevent seizure.
5. Vacuum-Induced “Cold Welding”
Interfacial Bonding: In a vacuum, the thin oxide layer that usually prevents metals from sticking is stripped away. If two clean metal robotic surfaces touch (e.g., in a gripper), they can “Cold Weld” together, effectively fusing into a single piece.
V. Economic & Tech Scenarios
1. The “Gas Station in the Sky” (Orbital Logistics)
This model shifts the satellite business from a “One-and-Done” launch cycle to a Sustained Orbital Lifecycle.
The Model: Robotic tankers (e.g., Orbit Fab) provide “Sling-and-Dock” refueling. Missions like Shilling and ASTRAL aim to validate the transfer of high-pressure Xenon, hydrazine, and green propellants to satellites via the RAFTI (Rapidly Attachable Fluid Transfer Interface).
Strategic Focus: Maneuver-without-Regret. Traditional operators conserve fuel to reach a 15-year lifespan; refuelable satellites could use fuel less conservatively for orbit-raising, collision avoidance, and deep-space transitions, knowing a robotic “shuttle” can top them off.
Key Driver: Transition from CapEx to OpEx. Launch providers no longer abandon billion-dollar assets; they pay a subscription for “fuel-delivery-as-a-service,” extending the life of GEO satcoms and defense assets indefinitely.
2. The “Modular Megastructure” (In-Space Assembly - ISAM)
This scenario addresses the “Fairing Constraint” where everything launched must fit inside a 5-meter rocket nose cone.
The Model: Robotic platforms in Low Earth Orbit (LEO) or Lagrange points assemble kilometer-scale structures from “flat-pack” modules. Examples include Space Solar’s AlbaTRUSS project, which uses dual-arm robotic manipulators to build the backbone of Space-Based Solar Power (SBSP) satellites.
Tech Scenario: Segmented Mirrors & Truss Growth. Instead of launching a monolithic 6.5m telescope (like JWST), robots assemble a 20-meter segmented reflector piece-by-piece. Walking robots (like Canadarm3) traverse the growing structure, snapping modular “longerons” into place to form gigawatt-scale power arrays.
Key Driver: Persistence Infrastructure. Gigawatt-scale solar power beamed to Earth via microwaves requires structures too large to survive a launch; they must be “born” in the vacuum of space.
3. The “Regolith-to-Runway” Model (Lunar/Martian ISRU)
The “Earth-Independence” mandate for the Artemis and Moon-to-Mars programs.
The Model: In-Situ Resource Utilization (ISRU). Autonomous rovers (e.g., NASA’s VIPER or ICON’s Olympus) harvest lunar regolith (silica-rich dust) and “sinter” it into solid infrastructure.
Tech Scenario: Laser & Microwave Vitrification. Robotic “bees” or 3D-printing rovers use concentrated solar energy to melt lunar soil into “glass bricks” or continuous landing pads. This protects incoming spacecraft from the “sandblasting” effect of their own engine plumes during landing.
Key Driver: Mass-Exclusion Strategy. Printing material on-site using local dirt effectively creates a “negative-cost” supply chain, enabling the construction of habitats and blast walls without heavy Earth-based cargo.
4. The “Self-Healing Mega-Constellation” (Resilient Sovereignty)
A “Point-of-Need” model for the commercial constellations (Starlink, Kuiper) and Defense agencies to ensure space-access during conflict or solar events.
The Model: A “Mother-Ship” robot (e.g., Astroscale’s ELSA-M or Starfish Space’s Otter) maintains a fleet of thousands of satellites. When a unit fails, a daughter drone intercepts it to perform a “Modular Swap.”
Strategic Focus: Orbital Replacement Units (ORUs). Future satellites designed with “LEGO-like” modular components. A robot could then theoretically swap out a fried processor or a damaged battery module in-situ, preventing the satellite from becoming “dead weight” in orbit.
Key Driver: Kessler Syndrome Mitigation. By actively repairing or de-orbiting malfunctioning units, robotic fleets could ensure that Low Earth Orbit remains navigable and commercially viable despite the surge in satellite traffic.
VI. Example Global Innovators
A. Orbital Servicing, Refueling & Logistics (The “Maintainers”)
These companies focus on the “Circular Economy” in orbit by extending the life of existing assets, refueling “dry” satellites, and removing debris to keep orbits navigable.
Northrop Grumman (USA):
The Model: Their Mission Robotic Vehicle (MRV), launching in 2026, evolves from simple docking to active manipulation.
Strategic Focus: It deploys “Mission Extension Capsules” (MEC) that act as external jetpacks for aging satellites, effectively modularizing orbital propulsion.
Astroscale (Japan/UK):
The Model: The ELSA-M mission (2026) is the world’s first commercial multi-client debris removal service.
Strategic Focus: Using magnetic and robotic capture to safely de-orbit multiple failed “mega-constellation” satellites (like OneWeb) in a single flight.
Orbit Fab (USA/UK):
The Model: The Shilling Mission (2026) validates the RAFTI refueling port, the “gas station nozzle” of space.
Strategic Focus: Transitioning satellites from “disposable” to “refuelable,” enabling aggressive maneuvers for defense and commercial agility.
Starfish Space (USA):
The Model: The Otter satellite tug.
Strategic Focus: High-precision, low-cost “proximity operations” (PropOps) using software-defined docking to move satellites into different orbital planes.
Impulse Space (USA):
The Model: The Helios high-energy kick stage (debuting 2026).
Strategic Focus: Rapid orbital “towing” from Low Earth Orbit (LEO) to Geostationary Orbit (GEO) in hours rather than months, powered by the Deneb engine.
ClearSpace (Switzerland):
The Model: ClearSpace-1 (The Claw).
Strategic Focus: A four-armed robotic system designed to “hug” and capture uncooperative, tumbling legacy space junk for controlled atmospheric re-entry.
B. In-Space Assembly & Manufacturing (The “Builders”)
This cluster addresses the “Fairing Constraint.” These robots build structures in space that are too large, fragile, or complex to be launched from Earth in one piece.
Redwire Space (USA):
The Model: Archinaut system.
Strategic Focus: Combining 3D printing with robotic assembly to extrude 10-meter solar array trusses in-situ, providing 5x the power density of traditional folded arrays.
Maxar Technologies (USA):
The Model: The SPIDER (Self-assembling Space Peripheral Operations Robot).
Strategic Focus: A multi-jointed arm designed to assemble a 3-meter communications antenna in orbit, proving that high-gain dishes don’t need to be pre-assembled on Earth.
Space Solar (UK):
The Model: AlbaTRUSS robotic assembly.
Strategic Focus: Autonomous robots that snap together modular “longeron” tubes to build gigawatt-scale solar farms multiple kilometers long.
ThinkOrbital (USA):
The Model: The ThinkPlatform sphere.
Strategic Focus: Utilizing autonomous electron-beam welding (validated in 2024) to assemble massive spherical habitats and shipyards that potentially offer 4x the volume of the ISS.
D-Orbit (Italy):
The Model: ION Satellite Carrier.
Strategic Focus: An orbital “last-mile delivery” vehicle that uses robotic dispensers to deploy satellite swarms into precise, custom coordinates.
C. Precision Manipulation & Kinetic Intelligence (The “Brain & Limbs”)
These are the “Component Primes” who provide the specialized hardware and software such arms, sensors, and AI that allow the “Builders” and “Maintainers” to function.
GITAI (Japan/USA):
The Model: Humanoid-style manipulators.
Strategic Focus: Using haptic feedback to allow Earth-based operators to perform delicate tasks (like plugging in cables) through a robotic avatar on a lunar base.
PickNik Robotics (USA):
The Model: MoveIt Studio software.
Strategic Focus: The “operating system” for space arms, allowing robots to autonomously plan paths around obstacles without needing a human to script every movement.
Honeybee Robotics (USA):
The Model: Planetary Deep Drill.
Strategic Focus: Specializing in “Dust-Proof” gearboxes and drills that can penetrate hundreds of meters of Martian ice to search for water.
Motiv Space Systems (USA):
The Model: COLDArm (Cold Operable Lunar Deployable Arm).
Strategic Focus: A robotic arm using Bulk Metallic Glass (BMG) gears that operates in -180°C lunar nights without the need for power-hungry heaters.
Tethers Unlimited (USA):
The Model: SpiderFab technology.
Strategic Focus: Creating robots that “weave” high-performance carbon-fiber trusses in space, enabling the creation of massive, lightweight structural frames.
D. Planetary Surface & Lunar Infrastructure (The “Surface Layer”)
The pioneers of the Lunar South Pole. These robots are the first “citizens” of other worlds, potentially building the roads and landing pads for future human settlers.
NASA JPL (USA):
The Model: CADRE (Cooperative Autonomous Distributed Robotic Exploration).
Strategic Focus: Swarm of three “shoebox-sized” rovers that explore the Moon as a team without human direction.
Intuitive Machines (USA):
The Model: Nova-C class landers.
Strategic Focus: Providing “Precision Landing as a Service,” using autonomous hazard detection to touch down safely in the rugged, cratered Lunar South Pole.
ispace (Japan):
The Model: HAKUTO-R lander and rovers.
Strategic Focus: Leading the commercial hunt for “Lunar Water Ice,” deploying small rovers to enter permanently shadowed regions (PSRs).
ICON (USA):
The Model: Project Olympus.
Strategic Focus: Large-scale Lunar 3D printing. Using autonomous “extruders” to turn local regolith into landing pads and blast walls, reducing the “sandblasting” damage caused by rockets.
VII. Potential Opportunities for Innovators
These opportunities move beyond basic mechanical automation toward creating kinetic intelligence that can survive and adapt to extreme vacuum and thermal environments.
1. Haptic Tele-Presence & “Avatar” Control
The primary goal is to bridge the “Proprioception Gap” between Earth-based operators and orbital robots, allowing for delicate repairs (e.g., swapping circuit boards) without the latency-induced “jitters.”
Innovator: Meltin MMI (Japan)
Product: MELTANT-Alpha / Haptic Robotic Limbs
Status: Currently being integrated into Lunar base simulations to test remote assembly of pressurized modules.
Technological Edge: Their system utilizes bio-mimetic cable-driven actuators and ultra-low latency haptic gloves. This allows an operator to “feel” the torque of a screw or the resistance of a cable connector in real-time, effectively enabling “Earth-side” surgeons or engineers to perform complex EVAs without leaving the ground.
2. Neuromorphic “Event-Based” Perception
Traditional CMOS cameras fail in the high-contrast environment of space (blinding sun vs. pitch-black shadows). Innovators are moving toward “Event-Based” sensing that mimics the human eye’s focus on motion.
Innovator: Prophesee (France)
Product: Metavision (Neuromorphic Vision Sensor)
Status: In collaboration with the ESA and NASA for test-flights of autonomous docking sensors.
Technological Edge: Unlike standard cameras that take 30-60 “frames” per second, Metavision sensors only process pixel-level changes. This allows for a 120dB+ Dynamic Range (seeing into shadows while facing the sun) and microsecond temporal resolution, essential for docking with fast-tumbling debris.
3. Heater-less “Cryo-Actuators” (Bulk Metallic Glass)
Standard robotic joints freeze during the 14-day Lunar night. The “white space” opportunity is in removing the need for power-hungry survival heaters.
Innovator: Amorphology (USA) / Motiv Space Systems (USA)
Product: COLDArm / BMG Gearboxes
Status: Selected for NASA’s Lunar South Pole missions.
Technological Edge: Utilizing Bulk Metallic Glass (BMG); a multi-component alloy with an amorphous atomic structure. BMGs do not become brittle at cryogenic temperatures. This allows robotic arms to operate at -180°C without any lubrication or internal heaters, increasing mission duration by 40% due to saved battery mass.
4. Bio-Inspired “Gecko” Adhesion & Vertical Mobility
In a vacuum, suction is impossible and magnets only work on ferrous hulls. Innovators are utilizing van der Waals forces to allow robots to “walk” on any spacecraft surface.
Innovator: OnRobot (Denmark) / NASA JPL
Product: Gecko Gripper (Space-Grade)
Status: Licensed for commercial use; currently being tested by orbital servicing firms for “Zero-G Grappling.”
Technological Edge: The gripper uses millions of microscopic polymer stalks that adhere to surfaces through molecular attraction. It can “stick” and “peel” on command without leaving residue or applying damaging clamping force, enabling small “Crawler Robots” to inspect the exterior of the ISS or Starship without mechanical tethers.
5. Kinetic Tensegrity & “Drop-and-Explore” Swarms
Traditional rovers are fragile; they cannot be “dropped” into a crater or lava tube. The opportunity is in “Soft Robotics” that use structural tension to absorb massive impacts.
Innovator: Squishy Robotics (USA)
Product: Stationary & Mobile Tensegrity Robots
Status: Collaborating with NASA Ames to provide “first-response” sensor payloads for un-mappable Lunar craters.
Technological Edge: Their robots are constructed from a network of rigid rods and elastic cables. This Tensegrity design allows the robot to survive a 60-meter drop onto solid rock. Once landed, the robot “crawls” by shifting its center of gravity through cable tension, allowing for autonomous exploration of high-risk Lunar regions where traditional rovers would flip or shatter.